Umělý horizont

1) Průzkum akcelerometru
Náklon v různých směrech (x, y, z) microbit poznává pomocí akcelerometru, který měří zrychlení. Nejprve musíme prozkoumat, jaké hodnoty vrací v různých polohách.
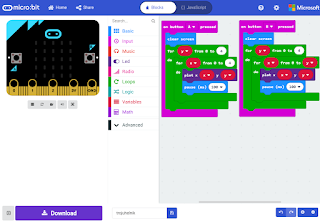
Pokud měříme v dosahu usb kabelu, můžeme pro zkoumání využít sériovou komunikaci a místo stisknutí tlačítka použijeme v opakuj stále blok Pokročilé > Sériová komunikace > sériový zapiš řádek a v něm vstup zrychlení (mg) x. Přidáme krátké čekání a po stisknutí tlačítka Zobrazit data zařízení pod simulátorem ihned vidíme hodnoty.

Jaká fyzika je za tím schovaná? Na Zemi v každém okamžiku směřuje tíhové zrychlení směrem dolů (kousek od středu Země). Proto akcelerometr microbitu vnímá stálou hodnotu i když se nepohybuje. Osa x je ve směru spojnice tlačítek, takže nakloníme-li microbit tlačítkem A dolů, získáme nejvíce záporné číslo a tlačítkem B dolů nejvíce kladné číslo. Osy y, z také stojí za prozkoumání.
Zaznamená microbit změnu zrychlení při každém pohybu? Musí zrychlovat, zpomalovat nebo zatáčet. Pokud se pohybuje rovnoměrně, naměří stejné hodnoty, jako když volně leží. Na to přišel už Newton, i když žádný microbit neměl.
Nápověda ke kódu se sériovou komunikací:

2) Zjištěné hodnoty využijeme při tvorbě horizonu:
Musíme si rozmyslet, jaké obrázky chceme ve které poloze zobrazovat a také jaká čísla vybereme jako hranici mezi polohami. Po vyzkoušení upravíme hranice tak, aby bylo zobrazení co nejplynulejší.

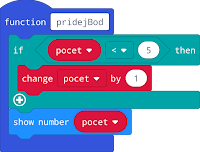
Nápověda ke kódu (spoiler): 

3) Volitelné pokračování – volant
Máme-li vyrobena autíčka s microbitem nebo se na ně teprve chystáme, můžeme do kódu doplnit odeslání vybraných povelů pomocí rádia. A možná přijdeme na to, jak poslat povel jen při změně polohy a ne pořád dokola.

<<< Intenzita světla
>>> Tlačítka Octopus
>>> Tlačítka Octopus
<<< Když zlobí když