Jezdící Kittenbot robo:bit (Hanka Šandová, 2018)


Jak se microbití robot naučil vyhýbat překážkám...
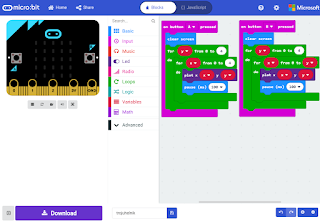
Po konzultaci o zapojení motorků (blesková reakce Rasel shop) a naprogramování v prostředí JavaScript Blocks Editor s importovaným balíčkem pro robot:bit se robot rozjel, na tlačítko A vpřed, tlačítko B zastavil, na obě couval.
Chtěla jsem ho také naučit, vyhýbat se překážkám a tak jsem se snažila najít, jak nakombinovat piny označené P0-P20 dostupné v programovacím prostředí s piny označenými na desce S1-S8 a A0-A2... a čtyřmi nožičkami SR04 - blok robot:bit pro ultrazvukové čidlo chce jen jeden pin. Tak jsem importovala ještě balíček pro ultrazvukové čidlo, které už chce dva piny a mohu si vybrat jednotky.
A tak se dílem náhodou a pokusem a omylem podařilo a překážky nejsou pro robota překážkou.